卷积操作
CNN中的C是Convolutional,也就是卷积。我们首先来看看卷积是什么含义。假设有一根针掉在铺面马赛克的地板上,由于针太小,马赛克的颜色也比较暗,我们无法一眼找到针在哪里。于是我们拿着一个特制的方形有色镜片(该镜片可以过滤到不相干的颜色,有助于看清楚针)在地上从左到右,从上到下,一格一格地找。最终,我们是一定可以找到针的。CNN的卷积操作和这个例子非常类似。我们首先定义下相关的概念。
- kernel:有的文献中也叫filter,kernel是一个
k x k的矩阵,它就类似上面例子中的有色镜片,可以从图片中提取出相应的特征。 - stride: 类似上面的例子,stride表示kernel在图片上移动时,每次移动几个格子。
有了上面两个概念,我们来看个例子,假设我们有下面这个3x3的kernel:
[ |
利用这个kernel对下图进行卷积操作的过程如下图所示:

图片来自:https://arxiv.org/pdf/1603.07285.pdf
首先,将kernel与左上角对齐,由于kernel的尺寸为3x3,所以它覆盖了图片左上角的3x3个像素,将对应位置的数值相乘后相加即可得到右边图片左上角格子上的值。然后依次从左往右,从上往下移动kernel对剩下的像素进行卷积操作,即可得到最右下角的最终结果。
从上图中,我们可以看到原图的9个像素经过卷积操作后变成了目标图的1个像素,这是一个多对一的操作。卷积操作是从原图中提取特征,经过卷积操作后得到的3x3矩阵叫做feature map(特征图)。
stride有什么用?
上图中stride为1,即kernel每次移动一个像素。如果stride为2的话,kernel每次移动2个像素,这样最终得到的feature map就只有2x2了。
如果输入图不止一个通道呢?
上图中,图片只有1个通道,可以认为是黑白图。对于彩色图片,有RGB三个通道,卷积操作有什么变化呢?
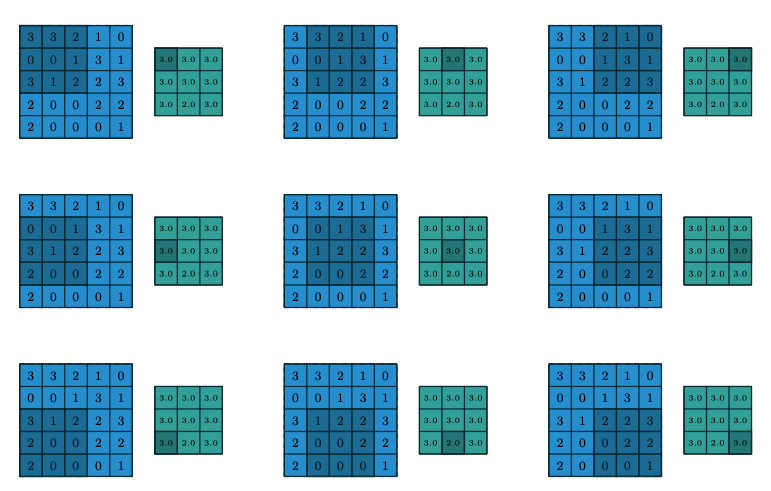
输入图片有c个通道,那么kernel也需要有c个通道,也就是说kernel变成了三维,其shape变成了(k, k, c),可以理解为c个
k x k大小的kernel的重叠在一起(注意:它们还是一个kernel)。卷积运算就是将c个k x k的kernel分别与输入图的c个通道的对应位置的数值相乘后再相加。参见下图。
最终得到特征图的维度还是二维的。
如果有多个kernel呢?
从上面可以看到一个kernel只提取一种特征,因为kernel的参数是确定的。如果我们需要提取多种特征,就需要多个kernel。那么最终得到的feature map也就变成了3维了,可以看成是每个kernel提取特征得到的feature map的叠加。如下图所示:
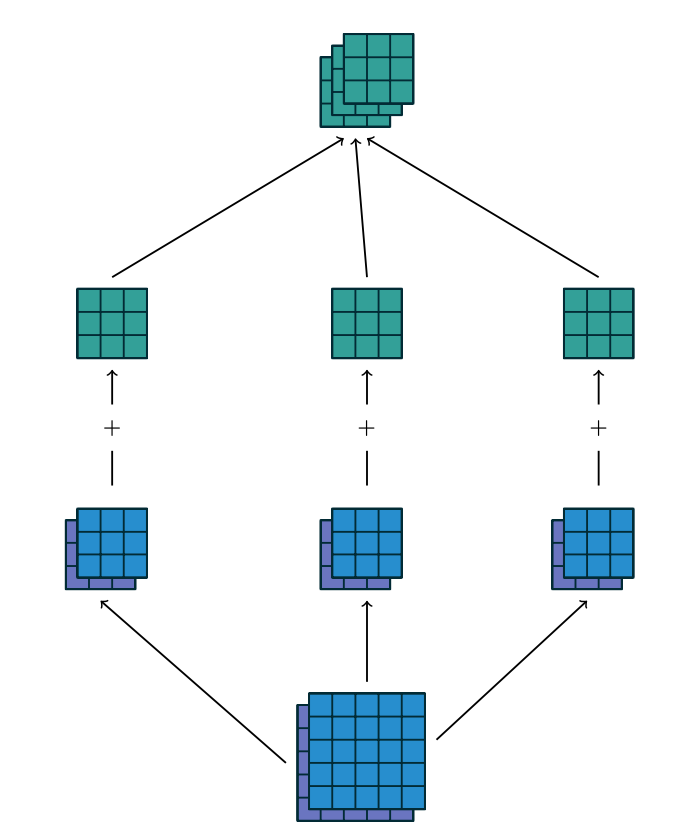
图片来自:https://arxiv.org/pdf/1603.07285.pdf
最下方为输入图,该输入图为有2个通道,经过三个kernel(注意:每个kernel也是有2个通道的)处理后,每个kernel得到一个3x3的feature map,将他们叠加在一起后得到一个长宽均为3,有3个通道的feature map。
padding是什么?
padding就是在输入图的四周补0,从而增加输入图的长宽,padding = 1则补一圈0,长宽各增加1。合理选择padding, kernel和stride的大小,可以使得输出图的长宽与输入图的长宽保持一致。
卷积操作的参数量和计算量
我们来看看卷积操作需要的参数数量和计算量。我们都用w * h * c的格式来表示图像的长宽和通道数,为了简化,我们将认为图像的长宽相同。假设输入的图像为Di x Di * M, 输出的图像为Dj * Dj * N,kernel的shape为K * K * M,总共需要N个这样的Kernel。记住一点:Kernel的通道数与输入图像的通道数一致,Kernel的个数与输出通道数一致。
这里需要注意的是,Kernel的长宽(也就是上面的K)和输出的特征图的通道数M是设计网络的时候需要确定的,也就是说要我们需要事先决定Kernel的长宽和个数。而输出图的长宽(Dj)是根据输入图的长宽,Kernel的长宽,stride和padding等因素计算出来的(具体计算公式可以参考相关论文)。kernel中每个元素的值是需要用数据训练出来的。
由此可见,一个卷积操作的参数量为K * K * M * N,kernel中的每个值都是需要训练的参数。如果考虑偏置量的话,则再加上N(每个输出通道上增加1个参数),在比较参数量的时候通常忽略偏置量。
卷积操作的计算量怎么计算呢?我们从输出图像的角度来考虑,输出图像总共有Dj * Dj * N个值需要计算,每个值都是由kernel在输入图像上经过卷积操作得来,根据卷积操作的逻辑,每个卷积需要K * K * M次乘法和加法完成。因此,对输入图进行一次完整的卷积计算需要的计算量即为Dj * Dj * N * K * K * M,它只与输出图像和Kernel有关,与输入的长宽无关。
卷积小结
在计算机视觉领域,卷积通常处理的是3维向量(暂不考虑batch),分别对应到图像的长宽和通道数。kernel就类似于滤镜,不同的kernel可以从输入图中过滤中不同的东西。kernel的长宽是网络设计时需要决定的参数,其通道数与输入图像的通道数一致。kernel的数量也是网络设计时需要决定的参数。它的数量与输出图像的通道数一致。
直观上来讲,卷积操作就是设计不同的kernel来从输入图中提取不同的特征,每个kernel只负责一种特征。仍不住再举个简单的例子,假设输入图是w h 1的,每个像素是int32值,从低到高,每8位分别表示RGB的值。此时,我们就可以设计3个1x1x1的kernel,每个kernel过滤一种颜色,3个kernel就可以将输入图转为w h 3的RGB方式表示的图像。原始输入图只有1个通道,经过三个kernel处理后就变成了RGB三个通道。
以上就是CNN网络中最基础的卷积操作。
Pooling
Pooling比卷积要简单,可以用与理解卷积相同的方式来理解Pooling。Pooling就相当于把Kernel区域的输入图的值取最大值或者取平均值。如果取最大值就是MaxPooling,如果取平均值就是AveragePooling。下图为MaxPooling的示意图。可见,经过Pooling以后,输入图的长宽变小。
图片来自:https://arxiv.org/pdf/1603.07285.pdf
示例
下面我们用Keras来构建一个简单的CNN网络:
from keras import Model, Sequential |
输入图的shape为(128,128,3),也就是长宽均为128,有3个通道的图片。经过4层卷积和Pooling后变成了(8 x 8 x 256)的特征图。在图片分类和目标检测的CNN网络中,特征图的长宽是逐渐减小的(本例中从128减小到8),而通道数是增加的(本例中是从3增加到256)。此外,可以看到Pooling层是没有需要训练的参数的。那你可能会问了,我们将输入图变成8x8x256的特征图以后有什么用呢?这个我们以后再说。